Productos
120:1 Mini Plastic Gearmotor HP, Offset 3mm D-Shaft Output

Este motorreductor compacto de alta potencia provee un torque máximo de 1.8 Kg-cm. Se alimenta con tensiones de entre 3v y 6v. Posee además, un reductor de 120:1 y un eje de 3mm. Su diseño le confiere la posibilidad de poder conectarle un encoder magnético así como también una rueda.
COD: P001512
Peso: 0.019 Kg
Disponibilidad: En Stock
ARS 3990.00
El producto no está disponible para la venta en este momento
Características
Description:
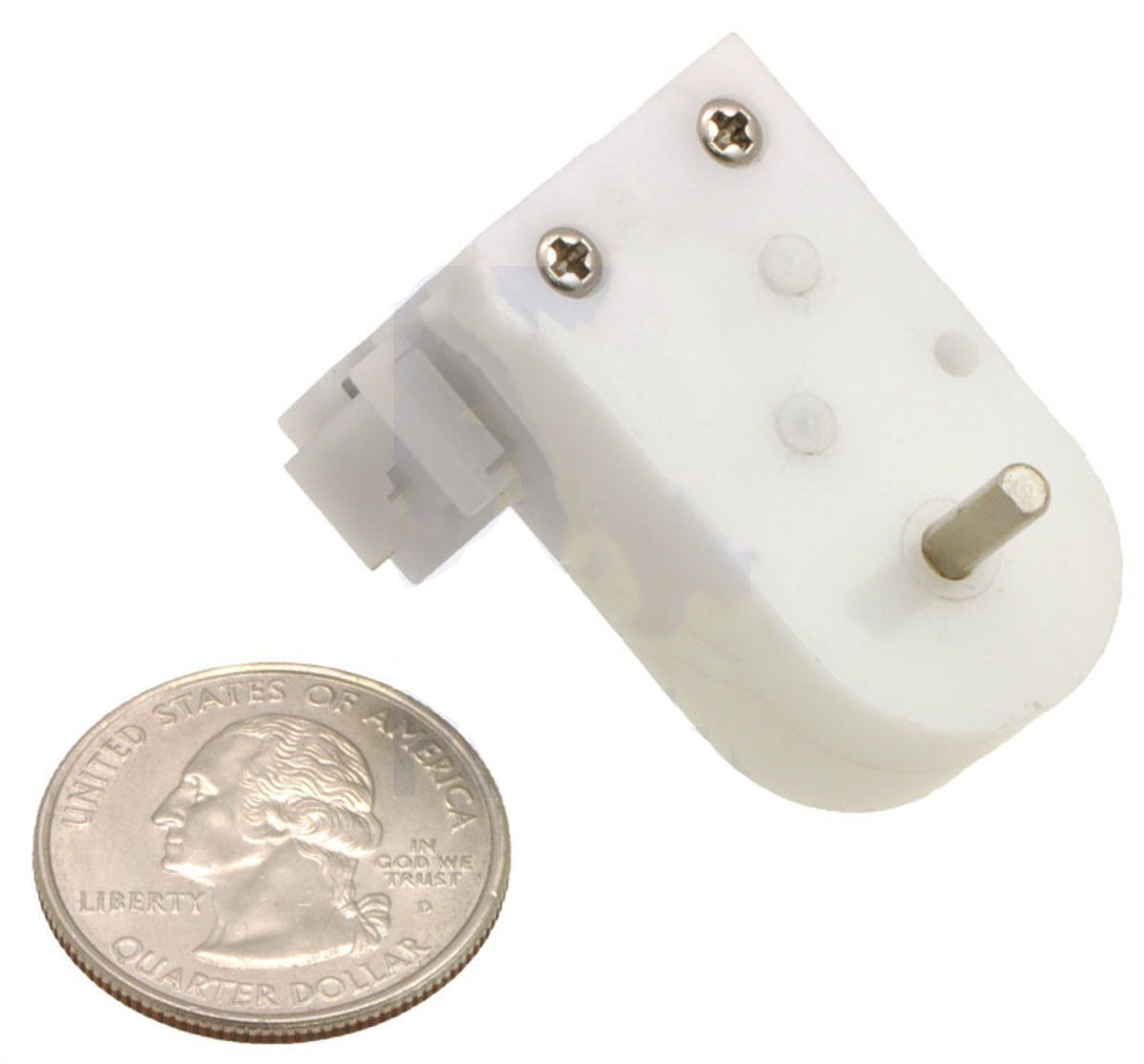
This compact, inexpensive plastic gearmotor (high-power brushed DC motor with a 120:1 reduction gearbox) is well suited for use in small robots. While intended for operation at 4.5 V, it should run comfortably in the 3 V to 6 V range. The gearbox has a 9.7mm-long, 3 mm-diameter D-shaped output shaft that is offset from but parallel to the motor shaft, and a built-in safety clutch helps protect the gears from excessive loads.
Key specs at 4.5 V: 150 RPM and 130 mA free-run, 25 oz-in (1.8 kg-cm) and 1.25 A stall.
Overview:
These brushed DC gearmotors are compact and affordable — perfect for building a quick, miniature robot. They are intended for use at 4.5 V, though in general, these kinds of motors can run at voltages above and below this nominal voltage, so they should operate comfortably in the 3 V to 6 V range (rotation can start at voltages as low as 0.5 V). Lower voltages might not be practical, and higher voltages could start negatively affecting the life of the motor. The plastic gearbox is protected by a built-in safety clutch that will typically slip before the gear teeth can shear (typically when the load exceeds around 25 oz-in, or 2 kg-cm).
Dimensions:
| Size: | 36.5 x 20 x 27.4 mm1 |
|---|---|
| Weight: | 19 g |
| Shaft diameter: | 3 mm2 |
General specifications:
| Shaft type: | offset 3mm D |
|---|---|
| Typical operating voltage: | 4.5 V |
| Gear ratio: | 120:1 |
| Free-run speed @ 4.5V: | 150 rpm |
| Free-run current @ 4.5V: | 130 mA |
| Stall current @ 4.5V: | 1250 mA |
| Stall torque @ 4.5V: | 25 oz·in3 |
| Extended motor shaft?: | N |
Recommended links:
- MATLAB script to plot motor performance curves for Pololu brushed DC gearmotors: This MATLAB script, written by Ali Asgher Mansoor Habiby, plots speed, power, current draw, and efficiency as they vary with torque when you input the gearmotor specifications. It also prints the resistance of the motor, and the current draw and torque at which maximum efficiency and maximum power occur.
- Robotic Proyect Example!!:
- https://www.pololu.com/blog/577/building-a-raspberry-pi-robot-with-the-a-star-32u4-robot-controller
More Details:
This item has a high-power motor (1250 mA stall current), a 120:1 gearbox, and a 3 mm diameter “D”-shaped output shaft that is offset from but parallel to the motor shaft. The motor shaft does not extend past the base of the motor. See the dimension diagram (77k pdf) of this gearmotor for more information.
 |
Galería de Imágenes



Galería de Videos

Archivos
 curva_operaci__n_motor.pdf (104 Kb)
curva_operaci__n_motor.pdf (104 Kb)- mini-plastic-gearmotor-90-degree-dimension-diagram.pdf (73 Kb)
- mini-plastic-gearmotor-90-degree-extended-shaft-dimension-diagram.pdf (68 Kb)
- mini-plastic-gearmotor-hp-90-degree-extended-shaft-dimension-diagram.pdf (69 Kb)
- mini-plastic-gearmotor-hp-offset-extended-shaft-dimension-diagram.pdf (68 Kb)
- mini-plastic-gearmotor-offset-dimension-diagram.pdf (75 Kb)
- mini-plastic-gearmotor-offset-extended-shaft-dimension-diagram.pdf (67 Kb)